Stepping Motor Driver
HOMEMinimalist circuit uses one CMOS gate and is reversible.
Many floppy drives and some subminiature printers contain bipolar stepping motors that draw very little current. The first circuit will drive small 5 volt steppers directly but you can switch to a 4070 chip and add output transistors to drive heaftier loads at higher voltages. The circuit is not particularly susceptible to motor transients and supports FULL STEPS FORWARD, FULL STEPS REVERSE, ACTIVE HOLD, and POWER OFF aka RELEASED. If the motor does not turn then swap around the leads of ONE of the two coils. To reverse the sense of the EN signal simply rework the circuit around an XNOR gate. Inspired by the circuits at Duane Johnson's site and Wilf Rigter's site.
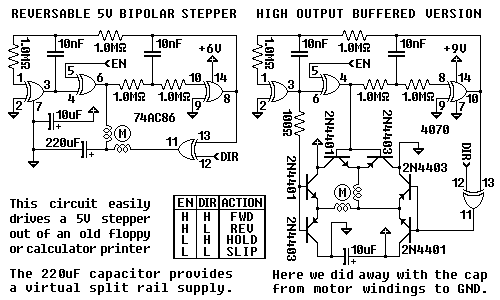
Note that 74LS86 TTL chips will not work in these circuits because
they can not source enough current to drive the motor. You might be able
to get away with using a common 74HC86 chip in place of the 74AC86 chip
if your motor is very small. 
Safety, accuracy and completeness of information provided herein is not guaranteed,
so be inspired by it but do not use it as a basis for experimentation or other actions.
 |
TOP | ©™ |
|
|
Version 20231217